You can find Camera Link scan examples for marathon (mE5-MA-VCL) platforms in the following sections. In and in examples for area and line scan cameras are described.
The basic acquisition for area scan cameras is very easy. You simply need to select a suitable camera operator. Connect the camera operator to an ImageBuffer and DmaToPC operator. Any processing logic can be placed in between, preferably behind the buffer. In the following basic examples for Camera Link configuration mode base, medium and full are presented.
Simply connect the three operators and parameterize them to meet your requirements. If you are using a bit depth no equal to eight or 16, you should consider a change of the output bit depth to one of these formats. In tutorial 'Applet Parameterization' explanations on bit depth modifications can be found.
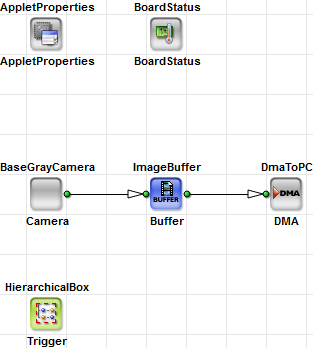
Figure 211. Basic Acquisition for Grayscale Camera Link Area Scan Cameras in Base Configuration Mode on marathon VCL
You can find the examples "BaseAreaGray8.va", "DualBaseAreaGray8.va" and "BaseAreaGray12.va" for 8 bit and 12 bit under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Area. The example "DualBaseAreaGray8.va" is a dual process design. Please read for information purpose under Device Resources the concept of shared memory on the microEnable 5 marathon platforms. For more information about the Trigger box in "BaseAreaGray8.va" and how to trigger Camera Link area scan cameras see 'Trigger'.
Please find the examples "BaseAreaRGB24.va" and "DualBaseAreaRGB24.va" for RGB 24 bit for acquisition with a camera in Camera Link base configuration under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Area. The example "DualBaseAreaRGB24.va" is a dual process design. Please read for information purpose under Device Resources the concept of shared memory on the microEnable 5 marathon platforms. For more information on how to trigger your Camera Link camera see 'Trigger'.
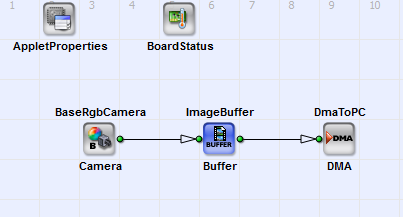
Figure 212. Basic Acquisition for RGB Camera Link Area Scan Cameras in Base Configuration Mode on marathon VCL
The use of medium cameras is similar to the use of cameras in Camera Link base configuration mode. The camera medium configuration camera operator allows a higher bandwidth. You find the example designs "MediumAreaGray8.va" and "MediumAreaGray12.va" for 8 bit and 12 bit for the medium configuration of a Camera Link grayscale camera under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Area.
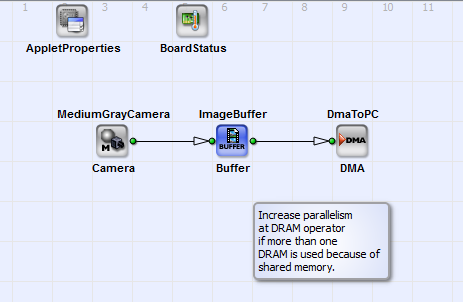
Figure 213. Basic Acquisition for Grayscale Camera Link Area Scan Cameras in Medium Configuration Mode on marathon VCL
Please find the example "MediumAreaRGB36.va" for 36 bit input bit depth for acquisition with a camera in Camera Link medium configuration under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Area.
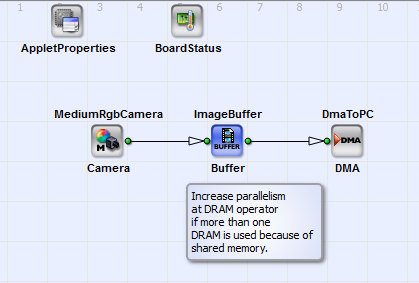
Figure 214. Basic Acquisition for RGB Camera Link Area Scan Cameras in Base Configuration Mode on marathon VCL
For the marathon frame grabber the usage of an area scan camera in full configuration mode is simple. The following figure shows the usage. Ensure to set the VALT_IMAGE2D image protocol in the link properties. You can find the examples "FullAreaGray8.va" and "FullAreaGray10.va" for 8 and 10 bit pixel depth under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Area.
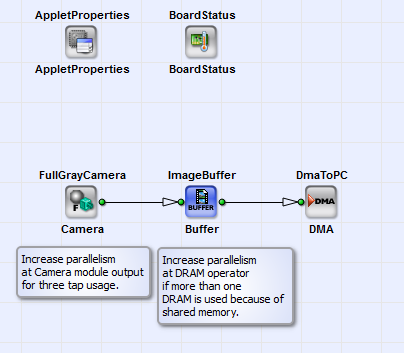
Figure 215. Basic Acquisition Design for marathon VCL Frame Grabber for Camera Link Area Scan Cameras in Full Configuration Mode
The acquisition for line scan cameras always requires the cut of the camera lines into images of a specific height. In detail, line scan cameras transfer line by line to the frame grabber. The transfer of data from the frame grabber to the PC is required to be send in packages i.e. frames. Therefore, the lines from line scan cameras have to be assembled into an image of a specific height. There exist numerous possibilities to specify the height. One simple possibility is to accumulate a specific number of lines to form an image, or the image height is determined by other dynamic sources such as external image trigger gate signals. The following example converts the line data from camera to 2D image data in SplitImage. Ensure to set the image protocol output of the camera operator to VALT_LINE1D. The examples are for grayscale cameras for Camera Link base and full configuration mode. Please adapt the example design for RGB cameras and Camera Link medium configuration equivalently.
The examples "BaseLineGray8.va", "DualBaseLineGray8.va" and "BaseLineGray12.va" for 8 bit and 12 bit pixel depth are basic acquisition designs for greyscale line cameras in Camera Link base configuration mode. The design "DualBaseLineGray8.va" is a dual process design. Please read for information purpose under Device Resources the concept of shared memory on the microEnable 5 marathon platforms. You can find the examples under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Line.
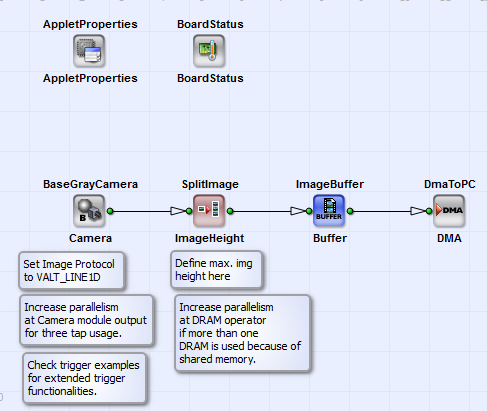
Figure 216. Basic Acquisition Design for marathon Frame Grabber for Grayscale Camera Link Line Scan Cameras in Base Configuration Mode
For the marathon frame grabbers we use TrgBoxLine. Ensure to set the image protocol output of the camera operator to VALT_LINE1D.
You find the examples "BaseLineRGB24.va" and "DualBaseLineRGB24.va" for 24 bit pixel depth (8 bits per color component) for acquisition with RGB line cameras in Camera Link base configuration mode under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Line. They are equivalent to the grayscale line scan acquisition design (see section ). Please read in section Device Resources the concept of shared memory on the microEnable 5 marathon platforms. This information is highly relevant for multiple process designs (e.g. "DualBaseLineRGB24.va") or designs which use multiple DRAM elements.
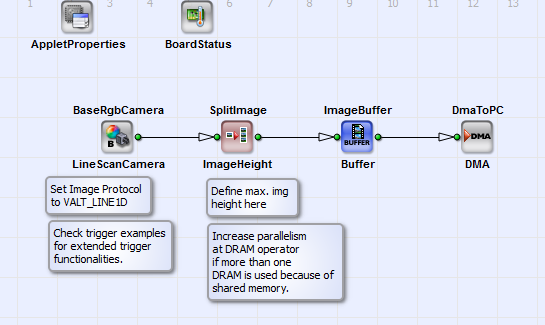
Figure 217. Basic Acquisition Design for marathon Frame Grabber for RGB Camera Link Line Scan Cameras in Base Configuration Mode
The examples "MediumLineGray8.va" and "MediumLineGray12.va" for 8 bit and 12 bit pixel depth are basic acquisition designs for greyscale line cameras in Camera Link medium configuration mode. They are equivalent to the designs for base configuration but allow a higher data rate. You can find the examples under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Line.
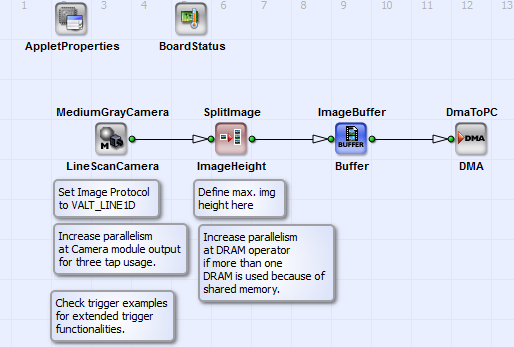
Figure 218. Basic Acquisition Design for marathon Frame Grabber for Grayscale Camera Link Line Scan Cameras in Base Configuration Mode
You find the example "MediumLineRGB36.va" for 36 bit pixel depth (12 bits per color component) for acquisition with RGB line scan cameras in Camera Link medium configuration mode under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Line. It is equivalent to the grayscale line scan acquisition designs (see section ).
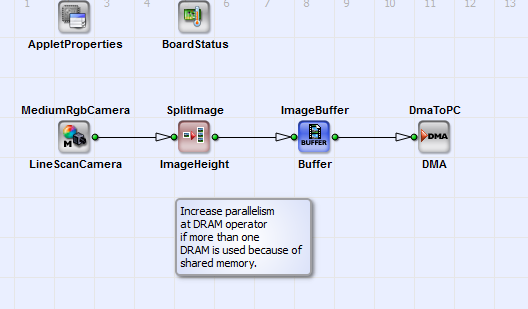
Figure 219. Basic Acquisition Design for marathon Frame Grabber for RGB Camera Link Line Scan Cameras in Base Configuration Mode
You can find the Camera Link full line scan acquisition design examples "FullLineGray8.va" and "FullLineGray10.va" for 8 bit and 10 bit pixel depth under \examples\Acquisition\BasicAcquisition\mE5-MA-VCL\Line\FullLineGray8.va. If you want to perform RGB image acquisition instead of grayscale, simply replace the operator "FullGrayCamera" by the operator "FullRgbCamera".
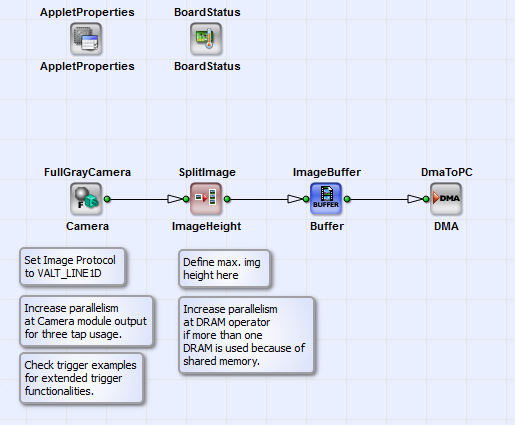
Figure 220. Basic Acquisition for marathon Frame Grabber for Camera Link Line Scan Cameras in Full Configuration Mode
